Auditing Latent Space Geometry in JAX
#ml#jax#representation-learning#latent-space#welch-bound#frame-theory#neural-collapse#simplex-etf#embeddings#implementation
Part 5 of 8Geometry of Representations
- 1Activations Are Bad for Geometry
- 2Opposite Is Not Different: The Cosine-Similarity Bug in CLIP and Contrastive Learning
- 3Not All Infinities Are Equal: The Cross-Entropy Asymmetry Behind Hallucination
- 4Untangling the Moons: A Visual History of Contrastive Learning
- 5What Makes a Good Latent Space? The Welch Bound and the Simplexthis post's explainer
- 6Latent on the Spectrum: Why Cats Sit Closer to Dogs Than to Cars
- 7The Three States of Information
- 8Distillation Is a Geometry, Not an Answer Key
The runnable companion to What Makes a Good Latent Space?. There I argued that a good latent space is a low-crosstalk codebook. Here we build the audit in JAX and render the same geometry as GIFs.
Prefer a notebook? Run the whole thing on Kaggle: the same code, block by block, with the math written out and every figure reproduced from a real run.
The point of the theory post was not “the Welch bound is cool.” The useful claim was operational:
Given a batch of embeddings, you should be able to tell whether the space is collapsing, whether it is using its dimensions, whether class means are moving toward a simplex, and whether an overloaded codebook is close to the Welch floor.
This post is that checklist: five audit metrics, each demonstrated on a small JAX scene built so you can watch the metric’s needle move:
- Collapse ratio: what it reads as same-class points tighten into their codes.
- Effective rank: what it catches when a spread-out cloud quietly loses a dimension.
- Simplex error: what it shows as class codes settle into the simplex, when they fit.
- Welch gap: how close the worst crosstalk gets to the floor, when they do not fit.
- Reachability: whether a plain optimizer finds these targets from any start, or only by luck.
The generator that made every GIF here lives in
scripts/jax-welch-geometry/. The code blocks below are the core math stripped
down to the pieces you would actually paste into a training loop.
The Shared Scaffolding
What do all five audits have in common? They start from the same two arrays:
import jax
import jax.numpy as jnp
# z: [n, d] embeddings
# y: [n] integer labels in {0, ..., c - 1}Most of the geometry in the Welch post lives on the sphere, so first normalize rows:
def l2_normalize(x, eps=1e-8):
return x / (jnp.linalg.norm(x, axis=-1, keepdims=True) + eps)Then build the one matrix that explains almost everything:
def gram(z):
z = l2_normalize(z)
return z @ z.Tgram(z)[i, j] is a cosine. Bright off-diagonal blocks mean collapse or
crosstalk. Blue off-diagonal entries mean negative correlation. A clean simplex
has one repeated off-diagonal value. A good overloaded frame spreads absolute
correlation evenly instead of letting one pair become the disaster pair.
For labeled embeddings, reduce examples to class codes:
def class_means(z, y, c):
z = l2_normalize(z)
one_hot = jax.nn.one_hot(y, c, dtype=z.dtype)
counts = jnp.sum(one_hot, axis=0)[:, None]
means = (one_hot.T @ z) / jnp.maximum(counts, 1.0)
return l2_normalize(means)That is the object we use for simplex and neural-collapse style audits:
m = class_means(z, y, c)
Gm = gram(m)1. Collapse: Are Classes Tightening?
Before asking whether the class means form a simplex, ask the simpler question: did each class become a point?
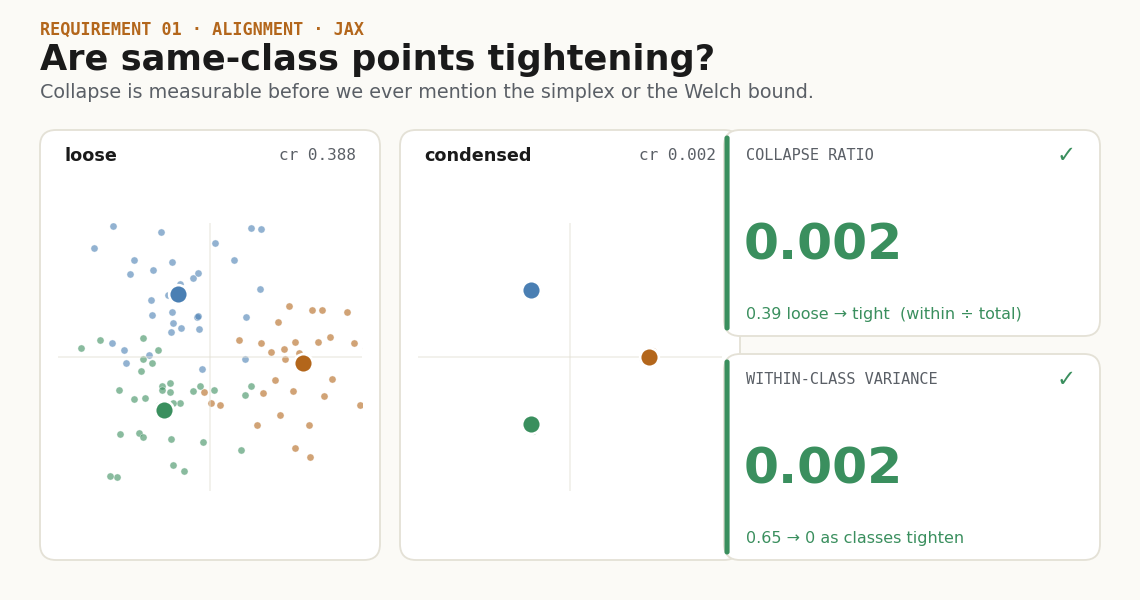
The direct metric is within-class variance:
def within_class_variance(z, y, c):
z = l2_normalize(z)
means = class_means(z, y, c)
residual = z - means[y]
return jnp.mean(jnp.sum(residual * residual, axis=-1))For dashboards, I prefer a scale-free ratio: within-class scatter divided by total scatter.
def collapse_ratio(z, y, c, eps=1e-8):
z = l2_normalize(z)
means = class_means(z, y, c)
global_mean = jnp.mean(z, axis=0, keepdims=True)
within = jnp.mean(jnp.sum((z - means[y]) ** 2, axis=-1))
total = jnp.mean(jnp.sum((z - global_mean) ** 2, axis=-1))
return within / (total + eps)This number is the first line of the report. It does not tell you whether the classes are arranged well; it only tells you whether each class is becoming a tight code. In neural collapse notation, this is the first thing that vanishes.
2. Rank: Is The Space Being Used?
A model can make clusters look separated while secretly wasting dimensions. The next audit asks whether the embedding really occupies the axes available to it.
The covariance eigenvalues tell you where the energy went:
def covariance_eigs(z):
z = z - jnp.mean(z, axis=0, keepdims=True)
cov = (z.T @ z) / jnp.maximum(z.shape[0] - 1, 1)
return jnp.linalg.eigvalsh(cov)Convert those eigenvalues into an entropy-based effective rank:
def effective_rank(z, eps=1e-12):
eigs = jnp.clip(covariance_eigs(z), 0.0)
p = eigs / (jnp.sum(eigs) + eps)
entropy = -jnp.sum(jnp.where(p > 0, p * jnp.log(p + eps), 0.0))
return jnp.exp(entropy)A round 2-D cloud gives roughly 2. A line gives roughly 1. In a 512-dimensional embedding, the exact value is less important than the trend: if this number is falling while your loss is improving, the model may be buying separation by destroying representational capacity.
3. Simplex: When The Class Codes Fit
Tight classes and healthy rank still say nothing about the arrangement. For
that, reduce each class to one normalized mean: if C centered class codes fit
in the dimension, the simplex target is one repeated off-diagonal cosine:
In code, build the target Gram matrix:
def simplex_gram(c, dtype=jnp.float32):
eye = jnp.eye(c, dtype=dtype)
return eye + (1.0 - eye) * (-1.0 / (c - 1))Then compare your class-mean Gram to that target:
def simplex_error(means):
means = l2_normalize(means)
c = means.shape[0]
G = means @ means.T
target = simplex_gram(c, G.dtype)
return jnp.sqrt(jnp.mean((G - target) ** 2))The GIF optimizes this error directly, just to make the target visible:
@jax.jit
def simplex_step(means, lr=0.04):
loss, grad = jax.value_and_grad(lambda x: simplex_error(x) ** 2)(means)
means = means - lr * grad
return l2_normalize(means), lossIn a real training run you usually would not optimize simplex_error alone.
You would log it. If it falls while the collapse ratio also falls, your class
means are not merely separating; they are becoming the centered codebook the
theory predicts.
4. Welch: When The Codes Do Not Fit
The simplex is the friendly case. The crowded case is more common: too many codes, too few dimensions. Now the right question is not “can we make every pair orthogonal?” We cannot. The question is how low the worst crosstalk can go.
The worst absolute off-diagonal cosine is the coherence:
def coherence(x):
x = l2_normalize(x)
G = x @ x.T
n = G.shape[0]
off_diag = G - jnp.eye(n, dtype=G.dtype)
return jnp.max(jnp.abs(off_diag))The Welch floor is:
def welch_floor(c, d):
c = jnp.asarray(c, dtype=jnp.float32)
d = jnp.asarray(d, dtype=jnp.float32)
return jnp.sqrt(
jnp.maximum(c - d, 0.0) / (d * jnp.maximum(c - 1.0, 1.0))
)So the audit metric is:
def welch_gap(x):
x = l2_normalize(x)
c, d = x.shape
return coherence(x) - welch_floor(c, d)In the renderer I use a smooth approximation to the max so gradient descent can move the points:
def smooth_coherence_loss(x, beta=30.0):
x = l2_normalize(x)
G = x @ x.T
n = G.shape[0]
off_diag = jnp.where(jnp.eye(n, dtype=bool), -jnp.inf, jnp.abs(G))
smooth_max = jax.nn.logsumexp(beta * off_diag) / beta
# Keep the frame from lowering crosstalk by wasting dimensions.
cov = (x.T @ x) / n
tightness = jnp.sum((cov - jnp.eye(x.shape[1]) / x.shape[1]) ** 2)
return smooth_max + 0.15 * tightnessThat last tightness term matters. Without it, a toy optimizer can lower some
pairwise terms while quietly wasting rank. The theory post kept saying the
three requirements travel together: tight classes, low crosstalk, and full rank.
The code has to respect the same bargain.
5. Reachability: Is The Geometry Even Findable?
Every audit above assumes the optimizer can reach the target. It can, and not
by luck. The frame potential has no bad
local minima (Benedetto & Fickus, 2003), so every random start lands on the same
floor . The cleanest way to see that in JAX is to descend from many
starts at once: a single vmap over a lax.scan descent.
Write the descent once as a pure lax.scan so it compiles into one fused loop
and vmaps over a batch of seeds for free:
import optax
def frame_potential(x):
return jnp.sum(gram(x) ** 2) # Σ_ij ⟨e_i, e_j⟩²
def descent(x0, loss_fn, opt, steps): # one projected-GD trajectory
state = opt.init(x0)
def body(carry, _):
x, s = carry
_, g = jax.value_and_grad(loss_fn)(x)
u, s = opt.update(g, s, x)
return (l2_normalize(optax.apply_updates(x, u)), s), x
_, xs = jax.lax.scan(body, (x0, state), None, length=steps)
return jnp.concatenate([x0[None], xs])
def run_many(key, c, d, n_seeds=6, steps=600):
x0s = l2_normalize(jax.random.normal(key, (n_seeds, c, d)))
one = lambda x0: descent(x0, frame_potential, optax.adam(0.05), steps)
fp = jax.vmap(jax.vmap(frame_potential))(jax.vmap(one)(x0s)) - c
return fp # every row → C²/d − CThe outer vmap runs six independent optimizations in parallel; the inner one
audits every snapshot of every trajectory. (The - c drops the constant
diagonal so the floor reads as the classic .) They all converge to
the same value, which is the practical payoff: you don’t have to be clever about
initialization, the landscape does the work.
The Report Function
For a real model, I would log one compact report every few hundred steps:
def latent_geometry_report(z, y, c):
z = l2_normalize(z)
means = class_means(z, y, c)
return {
"collapse_ratio": collapse_ratio(z, y, c),
"within_class_variance": within_class_variance(z, y, c),
"effective_rank": effective_rank(z),
"class_simplex_error": simplex_error(means),
"class_coherence": coherence(means),
"class_welch_gap": welch_gap(means),
}At the logging boundary:
report = jax.device_get(latent_geometry_report(z, y, c))
report = {k: float(v) for k, v in report.items()}The interpretation is straightforward:
collapse_ratiodown: classes are tightening.effective_rankhigh: the space is not wasting dimensions.class_simplex_errordown: class means are becoming a simplex when they fit.class_coherencedown: worst crosstalk is improving.class_welch_gapnear zero: the overloaded codebook is close to the geometric floor.
The Gram matrix is the visual version of the same report:
G = jax.device_get(gram(class_means(z, y, c)))Plot that matrix during training. If the off-diagonal entries become uniform, the story is happening.
Regenerate The Figures
The renderer lives in scripts/jax-welch-geometry/:
cd scripts/jax-welch-geometry
pip install -r requirements.txt
python generate.pyIt validates each descent against theory, then writes five files. The two audit metrics are controlled contrasts, so they ship as static figures; the three descents are real optimizations, so they animate:
public/jax-welch/class-collapse.pngpublic/jax-welch/rank-collapse.pngpublic/jax-welch/simplex-descent.gifpublic/jax-welch/welch-descent.gifpublic/jax-welch/benign-landscape.gif
The important thing is that the pictures are not separate from the code. The same JAX arrays produce the points, Gram matrices, and metrics. The visual is just the audit report made visible.
Cite as
Bouhsine, T. (). Auditing Latent Space Geometry in JAX. Records of the !mmortal Data Scientist. https://tahabouhsine.com/blog/welch-bound-jax-analysis/
BibTeX
@misc{bouhsine2026welchboundjaxanalysis,
author = {Bouhsine, Taha},
title = {Auditing Latent Space Geometry in JAX},
year = {2026},
month = {jun},
howpublished = {\url{https://tahabouhsine.com/blog/welch-bound-jax-analysis/}},
note = {Blog post, Records of the !mmortal Data Scientist}
}References
- (1974). Lower Bounds on the Maximum Cross Correlation of Signals. IEEE Transactions on Information Theory 20(3), 397–399.doi:10.1109/TIT.1974.1055219
- (2003). Finite Normalized Tight Frames. Advances in Computational Mathematics 18(2–4), 357–385.
- (2020). Prevalence of Neural Collapse During the Terminal Phase of Deep Learning Training. Proceedings of the National Academy of Sciences 117(40), 24652–24663.doi:10.1073/pnas.2015509117